Je
dán bod P [x,y,z]
v ortogonální soustavě souřadnic. Odvoďme transformační rovnice pro
souřadnice (x´, y´, z´) tohoto bodu v transformované soustavě, která
vznikne otočením o úhel a
kolem osy z v kladném smyslu (proti směru hodinových ručiček).
Otočení souřadné soustavy o daný úhel dává stejný výsledek jako otáčení
bodu P o stejný úhel podle středu souřadné soustavy.
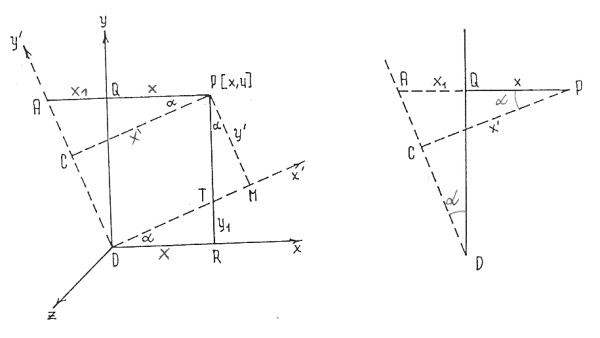
Situace je na obrázku (Kühn,
Weiss 1978) a z trojúhelníku ACP můžeme vyjádřit:
x´= (x1
+ x) cos a
a z trojúhelníku DQA pak plyne:
x1= y tg a
což po dosazení znamená
x´= x cos a + y sin
a.
Obdobně plyne i z trojúhelníků TMP a DQA:
y´= (y - y1) cos
a
a y1 = x tg a.
Po
dosazení
y´= -x sina + y cosa.
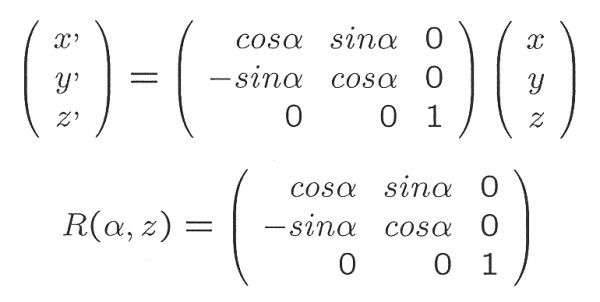
Soustava transformačních rovnic bude mít tento tvar:
x´ = x cosa
+ y sina
y´ = -x sina + y cosa
z´ = z
V maticovém tvaru bude transformace vyjádřena:
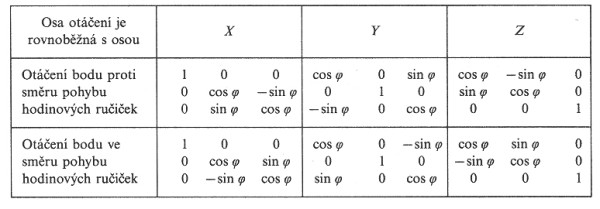
Tabulka transformačních matic pro obecný úhel pro jednotlivé osy x, y, z (podle Krause, 1993).